



São apresentados abaixo alguns projetos em desenvolvimento no PPMEC apenas para ilustrar o engajamento do seu corpo docente com a pesquisa.
2012 - Atual - INVESTIGANDO A ITERAÇÃO ENTRE PROGNOSTICO/GERENCIAMENTO DE SAÚDE E SISTEMA PRODUTO-SERVIÇO PARA O SUPORTE DE DECISÕES OPERACIONAIS.
Descrição: OBJETIVO PRINCIPAL O objetivo principal deste projeto é desenvolver uma metodologia que permita utilizar a tecnologia PHM no suporte de planos de negócio PSS. Desse modo, decisões operacionais relacionadas ao ciclo de vida de produtos/sistemas serão realizadas de forma mais efetiva, com base no monitoramento da saúde dos sistemas avaliados. OBJETIVOS ESPECÍFICOS Dentre os principais objetivos deste projeto de pesquisa estão: 1. Realizar o estudo do estado da arte sobre a integração PSS-PHM; 2. Especificar uma lista de tópicos que ainda não foram devidamente investigados (research gap). 3. Desenvolver um modelo funcional de integração PSS-PHM; 4. Realizar estudos experimentais no Centro de Excelência IVHM; 5. Realizar a validação do modelo funcional; 6. Realizar estudo de caso em empresas parceiras do Centro de Excelência IVHM (como Boeing, Roll-Royce, etc); 7. Realizar um estudo de empregabilidade dos resultados da pesquisa em empresas nacionais (Petrobrás, Embraer, etc); 8. Promover a capacitação técnica e científica de docentes, bem como de um doutorando e um pós-doutorando que estarão diretamente envolvidos na execução do projeto; 9. Promover a iteração entre o Programa de pós-graduação em Sistemas Mecatrônicos, a Faculdade Gama com o Centro de Excelência IVHM da Universidade de Cranfield/UK; 10. Promover a divulgação dos resultados da pesquisa através da elaboração de relatórios e da publicação de artigos em periódicos de notório reconhecimento internacional;.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Teixeira, Evandro Leonardo Silva - Integrante / Benny E. Tjahjono - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Cooperação.
Número de produções C, T & A: 1 / Número de orientações: 1
Alunos envolvidos: Graduação: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Teixeira, Evandro Leonardo Silva - Integrante / Benny E. Tjahjono - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Cooperação.
Número de produções C, T & A: 1 / Número de orientações: 1
2011 - Atual - Uso de Técnicas de Sensoriamento para Monitoração da Qualidade em Processos de Soldagem, Parte II (universal)
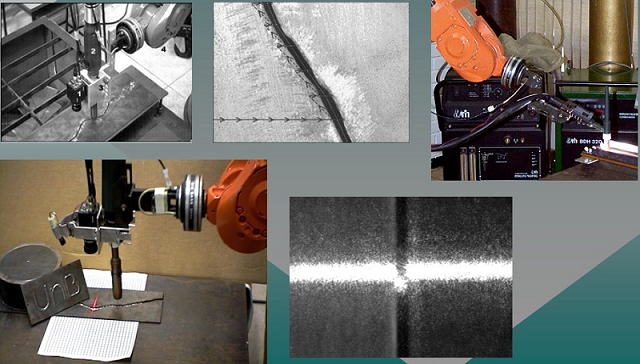
Descrição: Implementação de um sistema de monitoramento da qualidade da soldagem utilizando multi-sensoriamento: a espectroscopia ótica de emissão (trabalho já iniciado) para determinação da temperatura dos elétrons no arco de soldagem; sensoriamento por infravermelho para mapear flutuação da média da temperatura na coluna do arco; estudo da estabilidade do processo de soldagem a partir da atividade acústica e a sua variação diante a presença de defeitos, detecção baseado em técnicas de lógica nebulosa e sensores de visão (trabalho em fase de consolidação) para que através do processamento da imagem possa se relacionar à qualidade da junta soldada visando o desenvolvimento de um sistema de controle em tempo real através de fusão de sensores..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Mestrado acadêmico: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jesús E. Pinto Lopera - Integrante / Eber Huanca Cayo - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Número de produções C, T & A: 2 / Número de orientações: 2
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Mestrado acadêmico: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jesús E. Pinto Lopera - Integrante / Eber Huanca Cayo - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Número de produções C, T & A: 2 / Número de orientações: 2
2011 - Atual - Desenvolvimento e Construção de Sistema Robotizado para Reparos de Falhas de Cavitação em Turbinas Hidráulicas - FASE II
Descrição: Este projeto de pesquisa e desenvolvimento experimental propõe uma metodologia e um produto que permita a automatização do processo de soldagem para recuperação das pás, reduzindo riscos humanos e aumentando a eficiência do processo. Em projeto iniciado em janeiro de 2007, foi proposta a construção do robô em laboratório, que fosse capaz de realizar o processo de soldagem de forma automática. O robô resultante tem alta rigidez mecânica, facilidade de operação e montagem, baixo custo e de concepção mecânica simples. O equipamento pode identificar a posição e o perfil tridimensional das cavidades, através de equipamento ótico especificamente desenvolvido para esta tarefa, armazenar os dados geométricos em microprocessador e posicionar a tocha de soldagem sobre os pontos identificados, preenchendo as cavidades com material de adição. O equipamento também pode executar outras aplicações que exijam soldagem por camadas. O robô construído tem topologia do tipo esférico (manipulador com 3 graus de liberdade de rotação) e pulso com 2 graus de liberdade, portanto com 5 graus de liberdade totais. O robô foi todo construído com partes disponíveis no mercado (off-the-shelf) e, portanto, poderão ser construídos vários protótipos por pessoal não especializado (com custo bem menor), utilizando apenas um manual de montagem. Este projeto propõe a continuação do projeto anterior, que tinha como proposta a construção e comissionamento do robô nos laboratórios da Universidade de Brasília. A continuação do projeto propõe estudos mais amplos sobre a tecnologia de soldagem por camadas, o registro das imagens em controlador embarcado e sobre formas de fixação do robô nas turbinas, bem como das formas mais eficientes de integração entre todos os sistemas. Sua fixação na turbina poderá ser através de sistema magnético, por conta de seu maior alcance, por ventosas ou híbrido, o que for mais conveniente. Valor do Projeto: R$ 1.178.148,69. Duração: 36 meses..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (6) / Mestrado acadêmico: (4) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jorge Luiz de Almeida Ferreira - Integrante / Carlos Humberto Llanos Quintero - Integrante / Sadek C Absi Alfaro - Integrante / Eduardo de Magalhães Braga - Integrante / Paulo Villani Marques - Integrante / Paulo J Modenesi - Integrante.
Financiador(es): Centrais Elétricas do Norte do Brasil - Auxílio financeiro.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (6) / Mestrado acadêmico: (4) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jorge Luiz de Almeida Ferreira - Integrante / Carlos Humberto Llanos Quintero - Integrante / Sadek C Absi Alfaro - Integrante / Eduardo de Magalhães Braga - Integrante / Paulo Villani Marques - Integrante / Paulo J Modenesi - Integrante.
Financiador(es): Centrais Elétricas do Norte do Brasil - Auxílio financeiro.
2009 - Atual - Desenvolvimento de Sensor Ótico para Mapeamento Tridimensional de Superfícies para Uso em Sistema Robotizado para Preenchimento de Cavidades por Soldagem em Camadas
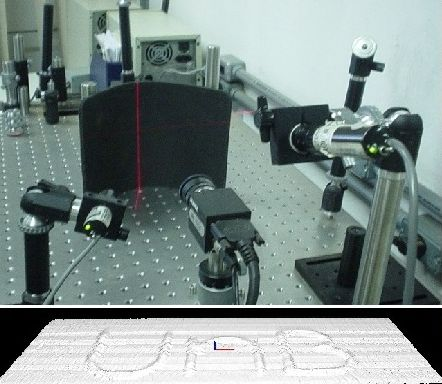
Descrição: O objetivo geral deste projeto de pesquisa é desenvolver estudos para otimizar a captura das imagens e melhorar sua qualidade, testar algoritmos mais velozes e estudar todas as variáveis que influenciam a precisão, velocidade e eficiência em um sistema de construção de modelos de superfícies em 3 dimensões, visando à soldagem robotizada por camadas. Além disso, serão estudados os métodos de ajustes de superfícies em nuvem de pontos de contorno aberto e de estratégias de fatiamento das cavidades a serem preenchidas na soldagem por camadas. Pretende-se, também, finalizar a interface entre o sistema de medição e o sistema de calibração do robô, este último já em fase final de desenvolvimento, permitindo um procedimento totalmente automático para a soldagem robotizada em camadas a partir dos mapas tridimensionais da superfície a ser soldada. Ensaios experimentais para análise da precisão do sistema de medição, bem como da exatidão dos robôs na tarefa de posicionamento para a soldagem em camadas deverão ser realizados com um robô ABB IRB-2000 e com o robô especialmente desenvolvido para uso em turbinas hidráulicas..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (2) / Mestrado acadêmico: (3) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Coordenador / Benedito Aloisio Nunes Campos - Integrante / André Luiz Pereira Correa - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Bolsa.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (2) / Mestrado acadêmico: (3) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Coordenador / Benedito Aloisio Nunes Campos - Integrante / André Luiz Pereira Correa - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Bolsa.
2009 - Atual - Sistema Multi-robôs para Execução Colaborativa de Tarefas usando Sensoriamento Ubíquo em Ambientes Não Estruturados
Descrição: Sub-projeto de pesquisa incluído no projeto institucional da Universidade de Brasília submetido e aprovado no Edital Capes Pro-equipamentos Institucional nº13/2008 com recursos no valor de R$ 196.000,00. Trata-se de um projeto envolvendo pesquisadores de três departamentos distintos da Universidade de Brasília com o objetivo de pesquisar técnicas de sensoriamento ubíquo, planejamento de trajetória e controle de grupo de robôs móveis em ambiente externo não estruturado e interfaceamento desses com o ambiente e com humanos. Mais especificamente a pesquisa está direcionada ao desenvolvimento de técnicas para fins de controle de três robôs móveis com diferentes especialidades de modo torná-los cooperativos em atividades tais como coleta de materiais sob supervisão humana..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (7) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Integrante / Guilherme Caribé de Carvalho - Integrante / Adolfo Bauchspiess - Integrante / Carlos Humberto Llanos Quintero - Integrante / Sadek C Absi Alfaro - Coordenador / Victor Hugo Casanova Alcade - Integrante / Gerson Henrique Pfitscher - Integrante / Carla Maria Chagas e Cavalcante Koike - Integrante / Ricardo Pezzuol Jacobi - Integrante / Geovany Araújo Borges - Integrante / João Yoshiyuki Ishihara - Integrante / Lélio Ribeiro Soares Júnior - Integrante / Jacir Luiz Bordim - Integrante / Marcus Vinícius Lamar - Integrante / Pedro de Azevedo Berger - Integrante / Díbio Leandro Borges - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Auxílio financeiro.Número de orientações: 1.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (7) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Integrante / Guilherme Caribé de Carvalho - Integrante / Adolfo Bauchspiess - Integrante / Carlos Humberto Llanos Quintero - Integrante / Sadek C Absi Alfaro - Coordenador / Victor Hugo Casanova Alcade - Integrante / Gerson Henrique Pfitscher - Integrante / Carla Maria Chagas e Cavalcante Koike - Integrante / Ricardo Pezzuol Jacobi - Integrante / Geovany Araújo Borges - Integrante / João Yoshiyuki Ishihara - Integrante / Lélio Ribeiro Soares Júnior - Integrante / Jacir Luiz Bordim - Integrante / Marcus Vinícius Lamar - Integrante / Pedro de Azevedo Berger - Integrante / Díbio Leandro Borges - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Auxílio financeiro.Número de orientações: 1.
2012 - Atual - INVESTIGANDO A ITERAÇÃO ENTRE PROGNOSTICO/GERENCIAMENTO DE SAÚDE E SISTEMA PRODUTO-SERVIÇO PARA O SUPORTE DE DECISÕES OPERACIONAIS.
Descrição: OBJETIVO PRINCIPAL O objetivo principal deste projeto é desenvolver uma metodologia que permita utilizar a tecnologia PHM no suporte de planos de negócio PSS. Desse modo, decisões operacionais relacionadas ao ciclo de vida de produtos/sistemas serão realizadas de forma mais efetiva, com base no monitoramento da saúde dos sistemas avaliados. OBJETIVOS ESPECÍFICOS Dentre os principais objetivos deste projeto de pesquisa estão: 1. Realizar o estudo do estado da arte sobre a integração PSS-PHM; 2. Especificar uma lista de tópicos que ainda não foram devidamente investigados (research gap). 3. Desenvolver um modelo funcional de integração PSS-PHM; 4. Realizar estudos experimentais no Centro de Excelência IVHM; 5. Realizar a validação do modelo funcional; 6. Realizar estudo de caso em empresas parceiras do Centro de Excelência IVHM (como Boeing, Roll-Royce, etc); 7. Realizar um estudo de empregabilidade dos resultados da pesquisa em empresas nacionais (Petrobrás, Embraer, etc); 8. Promover a capacitação técnica e científica de docentes, bem como de um doutorando e um pós-doutorando que estarão diretamente envolvidos na execução do projeto; 9. Promover a iteração entre o Programa de pós-graduação em Sistemas Mecatrônicos, a Faculdade Gama com o Centro de Excelência IVHM da Universidade de Cranfield/UK; 10. Promover a divulgação dos resultados da pesquisa através da elaboração de relatórios e da publicação de artigos em periódicos de notório reconhecimento internacional;.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Teixeira, Evandro Leonardo Silva - Integrante / Benny E. Tjahjono - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Cooperação.
Número de produções C, T & A: 1 / Número de orientações: 1
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Teixeira, Evandro Leonardo Silva - Integrante / Benny E. Tjahjono - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Cooperação.
Número de produções C, T & A: 1 / Número de orientações: 1
2011 - Atual - Uso de Técnicas de Sensoriamento para Monitoração da Qualidade em Processos de Soldagem, Parte II (universal)
Descrição: Implementação de um sistema de monitoramento da qualidade da soldagem utilizando multi-sensoriamento: a espectroscopia ótica de emissão (trabalho já iniciado) para determinação da temperatura dos elétrons no arco de soldagem; sensoriamento por infravermelho para mapear flutuação da média da temperatura na coluna do arco; estudo da estabilidade do processo de soldagem a partir da atividade acústica e a sua variação diante a presença de defeitos, detecção baseado em técnicas de lógica nebulosa e sensores de visão (trabalho em fase de consolidação) para que através do processamento da imagem possa se relacionar à qualidade da junta soldada visando o desenvolvimento de um sistema de controle em tempo real através de fusão de sensores..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Mestrado acadêmico: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jesús E. Pinto Lopera - Integrante / Eber Huanca Cayo - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Número de produções C, T & A: 2 / Número de orientações: 2
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Mestrado acadêmico: (1) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jesús E. Pinto Lopera - Integrante / Eber Huanca Cayo - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Número de produções C, T & A: 2 / Número de orientações: 2
2010 - 2013 - CT-Infra 2009 - Subprojeto SP6
Descrição: A Universidade de Brasília vem consolidando um grupo de pesquisa na área de automação, controle e informática em processos de fabricação. Este grupo reúne pesquisadores de varias áreas do conhecimento; mantém convênios internacionais com: Inglaterra, Alemanha e França e conta também com o apoio financeiro do PADCT, FINEP, FAP/DF, CNPq, CAPES, entre outros. O referido grupo de "AUTOMAÇÃO E CONTROLE EM PROCESSOS DE FABRICAÇÃO - GRACO" concentra sua atuação no conteúdo tecnológico de ponta em automação e controle de processos de fabricação, desenvolvimento de sistemas de manufatura integrados, controle digital, processamento digital de sinais, programação inteligente, teleoperação, mecatrônica, metrologia, simulação gráfica, análise de dados e transferência de tecnologia. A transferência de tecnologia ao parque industrial se dá por meio da atuação do Grupo com o CDT-UnB - Centro de Apoio ao Desenvolvimento Tecnológico, onde várias empresas incubadoras são formadas e é a porta para solução de problemas e transferência tecnológica ao parque industrial. Objeto Social do Grupo: a) Produzir, desenvolver, integrar e adaptar tecnologias, direta ou indiretamente, com vistas à sua industrialização, comercialização ou transferência ao setor produtivo; b) Contratar e gerenciar projetos de pesquisa e desenvolvimento nas áreas tecnológicas e atividades afins; c) Estimular e apoiar a criação de empresas na área tecnológica de sua especialização; d) Promover o intercâmbio com entidades e empresas de atividades afins, no sentido de permanente atualização tecnológica. e) Proceder a estudos e elaborar projetos tecnológicos nas áreas de desenvolvimento industrial, serviços e produção de insumos para as atividades afins; f) Procurar estabelecer um sistema de estreita cooperação técnico-científica com universidades e centros de pesquisa (nacional e/ou internacional), dentro de um quadro de interesse comuns e de complementação de recursos e esforços..
Situação: Concluído; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (3) / Mestrado acadêmico: (2) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jose Enrique Vargas Aures - Integrante / Llanos, Carlos Humberto - Integrante / Jesús E. Pinto Lopera - Integrante / Eber Huanca Cayo - Integrante.
Financiador(es): Financiadora de Estudos e Projetos - Auxílio financeiro.
Número de produções C, T & A: 3
Situação: Concluído; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (3) / Mestrado acadêmico: (2) / Doutorado: (1) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jose Enrique Vargas Aures - Integrante / Llanos, Carlos Humberto - Integrante / Jesús E. Pinto Lopera - Integrante / Eber Huanca Cayo - Integrante.
Financiador(es): Financiadora de Estudos e Projetos - Auxílio financeiro.
Número de produções C, T & A: 3
2009 - 2010 - Uso de Técnicas de Sensoriamento para Monitoração da Qualidade em Processos de Soldagem, Parte I:processo: 470421/2008-8 (universal)
Descrição: Edital MCT/CNPq 14/2008 - Universal - Número do processo: 470421/2008-8 A soldagem apresenta-se como um dos mais importantes processos de fabricação e vêm sendo utilizada nas mais variadas aplicações por parte da indústria. Apesar disso tem se caracterizado como uma operação centrada na capacidade manual, exigindo um alto nível de habilidade e experiência de técnicos especializados. Com relação à automação e o controle da soldagem, várias pesquisas estabeleceram relacionamentos entre os parâmetros de soldagem e as características que se deseja obter do cordão de solda, sendo possível pré-estabelecer parâmetros otimizados. No entanto, sabe-se que outros fatores também influenciam a execução da soldagem, como: geometria da peça soldada, efeitos relacionados ao ambiente de trabalho, etc. Assim, além da especificação correta ou otimização dos parâmetros, faz-se necessário estabelecer correções durante a soldagem com o objetivo de compensar os fatores que afetam a formação do cordão de solda e aparecimento de defeitos. Esta etapa caracteriza o controle em tempo real da soldagem. A principal motivação para este trabalho, é a implementação de um sistema de monitoramento da qualidade da soldagem utilizando multi-sensoriamento: a espectroscopia ótica de emissão (trabalho já iniciado) para determinação da temperatura dos elétrons no arco de soldagem; sensoriamento por infravermelho para mapear flutuação da média da temperatura na coluna do arco; estudo da estabilidade do processo de soldagem a partir da atividade acústica e a sua variação diante a presença de defeitos, detecção baseado em técnicas de lógica nebulosa e sensores de visão (trabalho em fase de consolidação) para que através do processamento da imagem possa se relacionar à qualidade da junta soldada visando o desenvolvimento de um sistema de controle em tempo real através de fusão de sensores. A meta do projeto será o desenvolvimento de um sensor para monitoração em tempo real dos processos de soldagem. Como me.
Situação: Concluído; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Mestrado acadêmico: (3) / Doutorado: (2) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Jose Enrique Vargas Aures - Integrante / Guilherme Carvalho - Integrante / Cayo, Eber Huanca - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Número de produções C, T & A: 6 / Número de orientações: 2
Situação: Concluído; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (1) / Mestrado acadêmico: (3) / Doutorado: (2) .
Integrantes: Sadek Crisostomo Absi Alfaro - Coordenador / Jose Enrique Vargas Aures - Integrante / Guilherme Carvalho - Integrante / Cayo, Eber Huanca - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Número de produções C, T & A: 6 / Número de orientações: 2
2011 - Atual - Desenvolvimento e Construção de Sistema Robotizado para Reparos de Falhas de Cavitação em Turbinas Hidráulicas - FASE II
Descrição: Este projeto de pesquisa e desenvolvimento experimental propõe uma metodologia e um produto que permita a automatização do processo de soldagem para recuperação das pás, reduzindo riscos humanos e aumentando a eficiência do processo. Em projeto iniciado em janeiro de 2007, foi proposta a construção do robô em laboratório, que fosse capaz de realizar o processo de soldagem de forma automática. O robô resultante tem alta rigidez mecânica, facilidade de operação e montagem, baixo custo e de concepção mecânica simples. O equipamento pode identificar a posição e o perfil tridimensional das cavidades, através de equipamento ótico especificamente desenvolvido para esta tarefa, armazenar os dados geométricos em microprocessador e posicionar a tocha de soldagem sobre os pontos identificados, preenchendo as cavidades com material de adição. O equipamento também pode executar outras aplicações que exijam soldagem por camadas. O robô construído tem topologia do tipo esférico (manipulador com 3 graus de liberdade de rotação) e pulso com 2 graus de liberdade, portanto com 5 graus de liberdade totais. O robô foi todo construído com partes disponíveis no mercado (off-the-shelf) e, portanto, poderão ser construídos vários protótipos por pessoal não especializado (com custo bem menor), utilizando apenas um manual de montagem. Este projeto propõe a continuação do projeto anterior, que tinha como proposta a construção e comissionamento do robô nos laboratórios da Universidade de Brasília. A continuação do projeto propõe estudos mais amplos sobre a tecnologia de soldagem por camadas, o registro das imagens em controlador embarcado e sobre formas de fixação do robô nas turbinas, bem como das formas mais eficientes de integração entre todos os sistemas. Sua fixação na turbina poderá ser através de sistema magnético, por conta de seu maior alcance, por ventosas ou híbrido, o que for mais conveniente. Valor do Projeto: R$ 1.178.148,69. Duração: 36 meses..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (6) / Mestrado acadêmico: (4) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jorge Luiz de Almeida Ferreira - Integrante / Carlos Humberto Llanos Quintero - Integrante / Sadek C Absi Alfaro - Integrante / Eduardo de Magalhães Braga - Integrante / Paulo Villani Marques - Integrante / Paulo J Modenesi - Integrante.
Financiador(es): Centrais Elétricas do Norte do Brasil - Auxílio financeiro.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (6) / Mestrado acadêmico: (4) / Doutorado: (2) .
Integrantes: José Maurício Santos Torres da Motta - Coordenador / Guilherme Caribé de Carvalho - Integrante / Jorge Luiz de Almeida Ferreira - Integrante / Carlos Humberto Llanos Quintero - Integrante / Sadek C Absi Alfaro - Integrante / Eduardo de Magalhães Braga - Integrante / Paulo Villani Marques - Integrante / Paulo J Modenesi - Integrante.
Financiador(es): Centrais Elétricas do Norte do Brasil - Auxílio financeiro.
2010 - Atual - Processo de Fabricação por Deposição de Metal em Camadas Sucessivas - Soldagem-3D: Bancada experimental para estudo do processo de soldagem 3D
Descrição: O objetivo principal deste projeto é desenvolver um robô cartesiano de três eixos que, integrado a uma mesa rotativa de deposição, ambos controlados por meio de um coordenador de movimentos, possibilite a implementação da bancada experimental do processo de fabricação por deposição em camadas sucessivas, de modo a permitir a execução de ensaios controlados necessários ao desenvolvimento do processo. Financiamento da FAP-DF no valor de R$ 37666,50.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (2) / Mestrado acadêmico: (1) .
Integrantes: Guilherme Caribe de Carvalho - Coordenador / Sadek Crisóstomo Absi Alfaro - Integrante / Carlos Humberto Llanos Quintero - Integrante / Taygoara Felamingo de Oliveira - Integrante / Rodrigo Castro Andrade - Integrante.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (2) / Mestrado acadêmico: (1) .
Integrantes: Guilherme Caribe de Carvalho - Coordenador / Sadek Crisóstomo Absi Alfaro - Integrante / Carlos Humberto Llanos Quintero - Integrante / Taygoara Felamingo de Oliveira - Integrante / Rodrigo Castro Andrade - Integrante.
2014 - Atual Caracterização de ligas com memória de forma para o desenvolvimento de absorvedores dinâmicos de vibração do tipo stockbridge
Descrição: O objetivo geral do projeto é avaliar o desempenho dinâmico de ligas com memória de forma para desenvolvimento de amortecedores dinâmicos de vibração do tipo stockbridge. O desempenho dinâmico será quantificado em termos de potência dissipada em função de frequência de excitação..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (2) / Especialização: (0) / Mestrado acadêmico: (1) / Mestrado profissionalizante: (0) / Doutorado: (0) .
Integrantes: Edson Paulo da Silva - Coordenador / Weimar Silva Castilho - Integrante / Tadeu Casto da Silva - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (2) / Especialização: (0) / Mestrado acadêmico: (1) / Mestrado profissionalizante: (0) / Doutorado: (0) .
Integrantes: Edson Paulo da Silva - Coordenador / Weimar Silva Castilho - Integrante / Tadeu Casto da Silva - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
2012 - 2012 - Caracterização Térmica de Materiais
Descrição: Levantamento de propriedades térmicas de materiais..
Situação: Concluído; Natureza: Pesquisa.
Integrantes: Edson Paulo da Silva - Coordenador / Guilherme Caribé de Carvalho - Integrante / José Maurício Santos Torres da Motta - Integrante / Sadek A C Alfaro - Integrante / Alberto José Álvares - Integrante / Cosme Roberto Moreira da Silva - Integrante / Emmanuel Pacheco Rocha Lima - Integrante / Carlo Humberto Llanos Quintero - Integrante / Eugenio Liborio Feitosa Fortaleza - Integrante / Aline Souza de Paula - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Auxílio financeiro.
Situação: Concluído; Natureza: Pesquisa.
Integrantes: Edson Paulo da Silva - Coordenador / Guilherme Caribé de Carvalho - Integrante / José Maurício Santos Torres da Motta - Integrante / Sadek A C Alfaro - Integrante / Alberto José Álvares - Integrante / Cosme Roberto Moreira da Silva - Integrante / Emmanuel Pacheco Rocha Lima - Integrante / Carlo Humberto Llanos Quintero - Integrante / Eugenio Liborio Feitosa Fortaleza - Integrante / Aline Souza de Paula - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Auxílio financeiro.
2010 - Atual - Desenvolvimento de um absorvedor dinâmico de vibração baseado no comportamento pseudoelástico das ligas com memória de forma
Descrição: As linhas de transmissão de energia elétrica estão sujeitas à ação do vento, que em muitas situações geram vibrações nos cabos condutores em níveis indesejados, que pode levar á falhas causando assim interrupção da transmissão de energia, podendo causar graves conseqüências e prejuízos às pessoas e empresas na casa de dezenas de milhões de reais. Para diminuir esse risco são utilizados tradicionalmente neutralizadores dinâmicos de vibração do tipo stockbridge. Eles diminuem os problemas de fadiga causados pelas vibrações eólicas resultantes da força que o vento exerce sobre os cabos condutores e cabos de guarda. Essas vibrações são transmitidas aos isoladores e apoios, prejudicando assim o seu funcionamento e podendo levar a falhas por fadiga, o que ocorre normalmente próximo aos grampos de suspensão. Este tipo de absorvedor tem um amortecimento relativamente baixo sendo bastante eficiente na redução da vibração no ponto de fixação dele com o cabo condutor, e nas suas freqüências naturais. Entretanto, para outras freqüências, a sua eficiência diminui consideravelmente, mesmo para freqüências apenas ligeiramente diferentes das freqüências naturais. O objetivo do projeto é desenvolver um absorvedor dinâmico de vibração do tipo "stockbridge" baseado no comportamento pseudoelástico das ligas com memória de forma. Os recursos aprovados somam R$ 1.021.000,00.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (4) / Mestrado acadêmico: (4) / Doutorado: (1) .
Integrantes: Edson Paulo da Silva - Coordenador / Alexandre Luis Amarante Mesquita - Integrante / Jorge Luiz A Ferreia - Integrante / José Alexander de Araújo - Integrante / Carlos José de Araújo - Integrante / Marcelo Amorim Savi - Integrante / Newton Sure Soeiro - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Bolsa / Financiadora de Estudos e Projetos - Auxílio financeiro.Número de orientações: 2
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (4) / Mestrado acadêmico: (4) / Doutorado: (1) .
Integrantes: Edson Paulo da Silva - Coordenador / Alexandre Luis Amarante Mesquita - Integrante / Jorge Luiz A Ferreia - Integrante / José Alexander de Araújo - Integrante / Carlos José de Araújo - Integrante / Marcelo Amorim Savi - Integrante / Newton Sure Soeiro - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Bolsa / Financiadora de Estudos e Projetos - Auxílio financeiro.Número de orientações: 2
2009 - 2010 - Caracterização Dinâmica de Materiais, Componentes e Estruturas
Descrição: A necessidade de caracterização dinâmica de materiais, componentes e estruturas é um comum a várias pesquisas desenvolvidas na UnB, de maneira especial na Faculdade de Tecnologia. A presente proposta prevê a aquisição de um Sistema Servohidráulico para montagem de uma bancada para caracterização dinâmica de materiais, componentes e estruturas. O Sistema Servohidráulico é composto basicamente de i) um atuador eletromecânico, ii) um controlador de vibrações e iii) componentes auxiliares. A bancada permitirá a realização de ensaios para levantamento de propriedades dinâmicas como freqüência natural, amortecimento, modos de vibração etc. A bancada que será montada terá um caráter fortemente multiusuário. Mais especificamente, ela dará suporte a pesquisas desenvolvidas por três grupos de pesquisa do Departamento de Engenharia Mecânica. São eles: o Grupo Avançado de Materiais Estruturais e Funcionais (GAMEF), o Grupo de Dinâmica de Sistemas (GDS) e o Grupo de Mecânica dos Materiais. Estes grupos desenvolvem pesquisas individuais e conjuntas que demandam tal estrutura laboratorial. (Edital No 11/2009 CAPES Pró-Equipamentos Institucional). .
Situação: Concluído; Natureza: Pesquisa.
Integrantes: Edson Paulo da Silva - Coordenador / José Alexander de Araújo - Integrante / Alberto Carlos Guimarães Castro Diniz - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Auxílio financeiro.
Situação: Concluído; Natureza: Pesquisa.
Integrantes: Edson Paulo da Silva - Coordenador / José Alexander de Araújo - Integrante / Alberto Carlos Guimarães Castro Diniz - Integrante.
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Auxílio financeiro.
2012 - Atual - Desenvolvimento de uma Plataforma Reconfigurável para um Sistema de Controle Embarcado para Robótica Móvel (Edital FAP-DF, Apoio à Pesquisa, Demanda Espontânea, processo 2010/00458-9).
Descrição: Este projeto objetiva a implementação de uma plataforma reconfigurável (baseada em FPGAs Field Programmable Gate Array) para a implementação de técnicas de localização, mapeamento e navegação aplicadas à robótica móvel. Um requisito essencial em mecatrônica e em sistemas móveis aplicados, como robôs móveis, é o desenvolvimento e a adaptação de algoritmos para plataformas embarcadas que alcancem tempos de execução e desempenho apropriados. Nesse contexto, dois importantes problemas merecem ser mencionados: (a) o problema do comportamento auto-adaptativo, que é geralmente resolvido ajustando os parâmetros do controle do robô de acordo à interação do robô com o meio ambiente e (b) o problema de planejamento em robótica, envolvendo a incorporação da nova informação obtida durante a execução do planejamento. Para tanto, neste projeto serão abordados os problemas supracitados no contexto de plataformas baseadas em sistemas reconfiguráveis (PROJETO APROVADO E AGUARDANDO LIBERAÇÃO DO RECURSO POR PARTE DA FAP-DF).
Situação: Desativado; Natureza: Pesquisa.
Alunos envolvidos: Mestrado acadêmico: (2) .
Integrantes: Carlos Humberto Llanos Quintero - Integrante / Carlos Humberto Llanos - Coordenador / André L S Braga - Integrante / Daniel M Muñoz - Integrante / Sadek A Alfaro - Integrante.
Financiador(es): Fundação de Apoio à Pesquisa do Distrito Federal - Auxílio financeiro.
Situação: Desativado; Natureza: Pesquisa.
Alunos envolvidos: Mestrado acadêmico: (2) .
Integrantes: Carlos Humberto Llanos Quintero - Integrante / Carlos Humberto Llanos - Coordenador / André L S Braga - Integrante / Daniel M Muñoz - Integrante / Sadek A Alfaro - Integrante.
Financiador(es): Fundação de Apoio à Pesquisa do Distrito Federal - Auxílio financeiro.
2011 - 2013 - Aplicações de Arquiteturas Reconfiguráveis para Robótica Móvel (Edital MCT/CNPq N º 14/2010 - Universal / Edital MCT/CNPq 14/2010 )
Descrição: Este projeto objetiva o uso de computação reconfigurável aplicada a problemas de robótica móvel tais como planejamento de trajetória, navegação e técnicas de otimização bio-inspiradas. Na área de sistemas embarcados para robótica móvel é importante garantir um alto desempenho na execução dos algoritmos assim como um baixo consumo de potência. Um grande desafio nesta área é possibilitar a execução de algoritmos de otimização em tempo real, os quais devem ser executados em plataformas embarcadas, com hardware limitado, usando clocks de baixa freqüência. A implementação em hardware dos algoritmos de otimização (do tipo bio-inspirados) permitirão o ajuste em tempo real de dos resultados de planejamento de trajetória para robôs móveis. Adicionalmente à melhora do desempenho dos algoritmos na plataforma reconfigurável, espera-se uma redução no consumo de potencia do sistema de controle, o que é bastante desejável no contexto de sistemas embarcados para robótica móvel, onde a autonomia energética é um ponto crítico. Valor: R$ 45.081,90.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Doutorado: (2) .
Integrantes: Carlos Humberto Llanos Quintero - Coordenador / André Braga - Integrante / Daniel M Muñoz - Integrante / Sadek A Alfaro - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Doutorado: (2) .
Integrantes: Carlos Humberto Llanos Quintero - Coordenador / André Braga - Integrante / Daniel M Muñoz - Integrante / Sadek A Alfaro - Integrante.
Financiador(es): Conselho Nacional de Desenvolvimento Científico e Tecnológico - Auxílio financeiro.
2011 - 2013 - Pesquisa em Automação da Manufatura, Automação de Processos, Robótica Industrial e Desenvolvimento de Produto (Edital Pró-equipamentos, Institucional 2010, subprojeto aprovado)
Descrição: Este projeto visa o desenvolvimento de ações para a modernização dos laboratórios associados aos Grupos de Pesquisa pertencentes ao Programa de Pós-Graduação em Sistemas Mecatrônicos do Departamento de Engenharia Mecânica da UnB visando a compra de equipamentos para serem usados em um contexto multi-uso e compartilhados atendendo aos laboratórios de Automação Industrial, Soldagem, Automação da Manufatura e Desenvolvimento de Produto, Automação de Processos de Eventos Discretos, Robótica e Visão Computacional e de Eletrônica. Todos os supracitados laboratórios dão suporte às atividades de pesquisa e ensino dos pesquisadores e alunos de pós-graduação vinculados ao Grupo de Automação e Controle (GRACO) e Grupo de Inovação em Automação Industrial (GIAI). O GRACO e o GIAI são grupos interdisciplinares de ensino e pesquisa, ligados ao Programa de Pós-Graduação em Sistemas Mecatrônicos (PPMEC) da UnB. Valor: R$ 136.204,54.
Situação: Em andamento; Natureza: Pesquisa.
Integrantes: Carlos Humberto Llanos Quintero - Coordenador / Guilherme Caribé do Carvalho - Integrante / Sadek A Alfaro - Integrante / José Mauricio Motta - Integrante / Alberto José Alvares - Integrante.
Financiador(es): CAPES - Centro Anhanguera de Promoção e Educação Social - Auxílio financeiro.
Situação: Em andamento; Natureza: Pesquisa.
Integrantes: Carlos Humberto Llanos Quintero - Coordenador / Guilherme Caribé do Carvalho - Integrante / Sadek A Alfaro - Integrante / José Mauricio Motta - Integrante / Alberto José Alvares - Integrante.
Financiador(es): CAPES - Centro Anhanguera de Promoção e Educação Social - Auxílio financeiro.
2012 - Atual -Controle de injeção de água em reservatórios de petróleo
Descrição: Controle de injeção de água em reservatórios de petróleo. Utilização de métodos de completação inteligente, simulçã de reservatório e controle de maneira a otimizar a injeção de agua e aumentar a taxa de recuperação do reservatório..
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (3) / Especialização: (0) / Mestrado acadêmico: (4) / Mestrado profissionalizante: (0) / Doutorado: (0) .
Integrantes: Eugenio Liborio Feitosa Fortaleza - Coordenador / Gustavo Abade - Integrante / Eder Lima de Albuquerque - Integrante / Taygoara F. de Oliveira - Integrante.
Financiador(es): CHEVRON BRASIL UPSTREAM - Auxílio financeiro.
Situação: Em andamento; Natureza: Pesquisa.
Alunos envolvidos: Graduação: (3) / Especialização: (0) / Mestrado acadêmico: (4) / Mestrado profissionalizante: (0) / Doutorado: (0) .
Integrantes: Eugenio Liborio Feitosa Fortaleza - Coordenador / Gustavo Abade - Integrante / Eder Lima de Albuquerque - Integrante / Taygoara F. de Oliveira - Integrante.
Financiador(es): CHEVRON BRASIL UPSTREAM - Auxílio financeiro.